🤖 AI机器人课程 - 第4周作业
👤 基本信息
- 姓名:张皓然
- 学号:20231877
📌 本周目标
- 学习 Python 基础控制
- 熟悉 ROS2 turtlesim 环境
- 使用速度控制实现机器人画圆
- 理解机器人运动学基础
⚙️ 实验内容
本周实验基于 ROS2 与 turtlesim 完成机器人圆周运动控制。
实验主要内容包括:
- 使用 Python 发布速度控制指令
- 控制机器人绘制圆形轨迹
- 调整线速度与角速度参数
- 观察不同参数对轨迹的影响
💻 ROS2 控制命令
发布速度命令
```bash id=”t4g92h”
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist
“{linear: {x: 2.0}, angular: {z: 1.0}}”
---
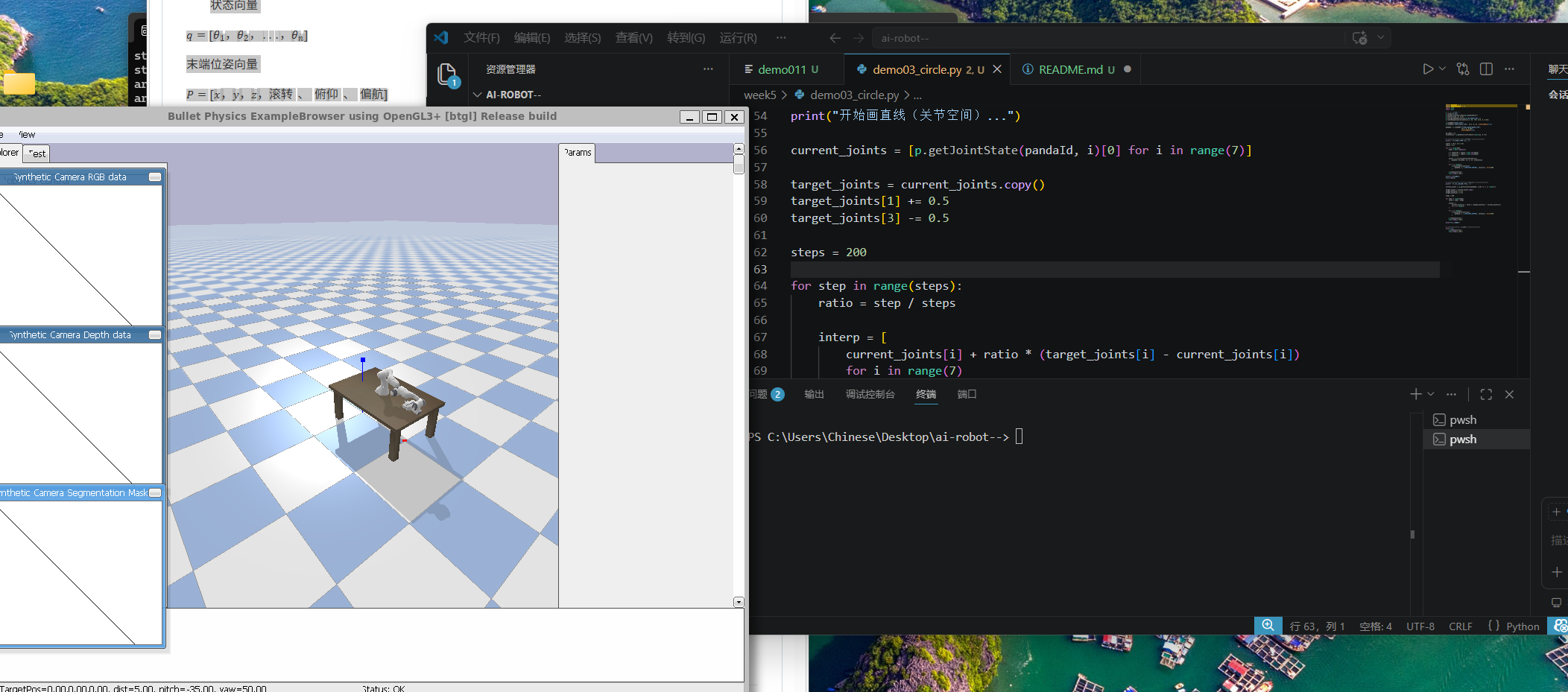
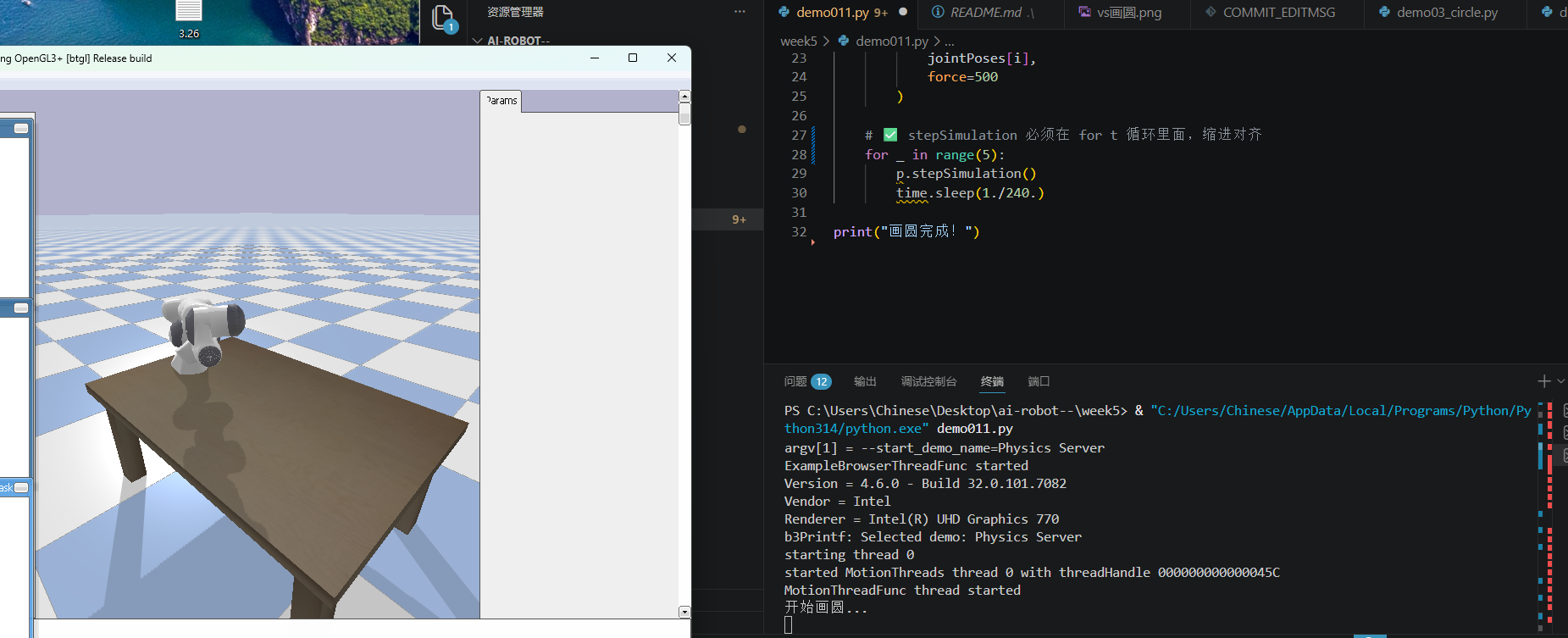
# 📂 代码文件
* demo011.py
* demo03_circle.py
* demo04_circle.py
---
# 📐 运动学公式
机器人圆周运动关系:
```text id="7d3r5x"
v = r × ω
其中:
- v:线速度(linear velocity)
- r:圆半径(radius)
- ω:角速度(angular velocity)
🚀 实验结果
圆形轨迹实验
大圆轨迹实验
💡 核心知识
Twist 消息
ROS2 中用于机器人速度控制的重要消息类型。
linear.x
控制机器人前进速度。
angular.z
控制机器人旋转速度。
⚠️ 问题与解决
问题
机器人运动轨迹不够平滑。
原因
线速度与角速度比例不合理。
解决方法
通过调整 linear.x 与 angular.z 参数比例,使机器人保持稳定圆周运动。
🧠 本周总结
通过本周实验:
- 学习了 ROS2 基础控制方式
- 理解了机器人运动学原理
- 掌握了 turtlesim 控制方法
- 学会了通过速度参数实现圆周运动
为后续机器人导航与运动控制实验打下基础。