AI机器人课程 - 第6周作业
👤 基本信息
- 姓名:张皓然
- 学号:20231877
📌 本周目标
- 实现机器人监视器
- 显示实时数据
- 学习 ROS2 Topic 订阅机制
⚙️ 实验内容
本实验基于 ROS2 turtlesim 环境,实现一个简单的机器人监视器。
主要功能:
- 订阅
/turtle1/pose - 实时显示乌龟位置
- 显示速度与方向信息
- 监控机器人运动状态
🧩 核心代码
self.create_subscription(
Pose,
'/turtle1/pose',
self.pose_callback,
10
)
通过订阅 pose topic,实现实时数据更新。
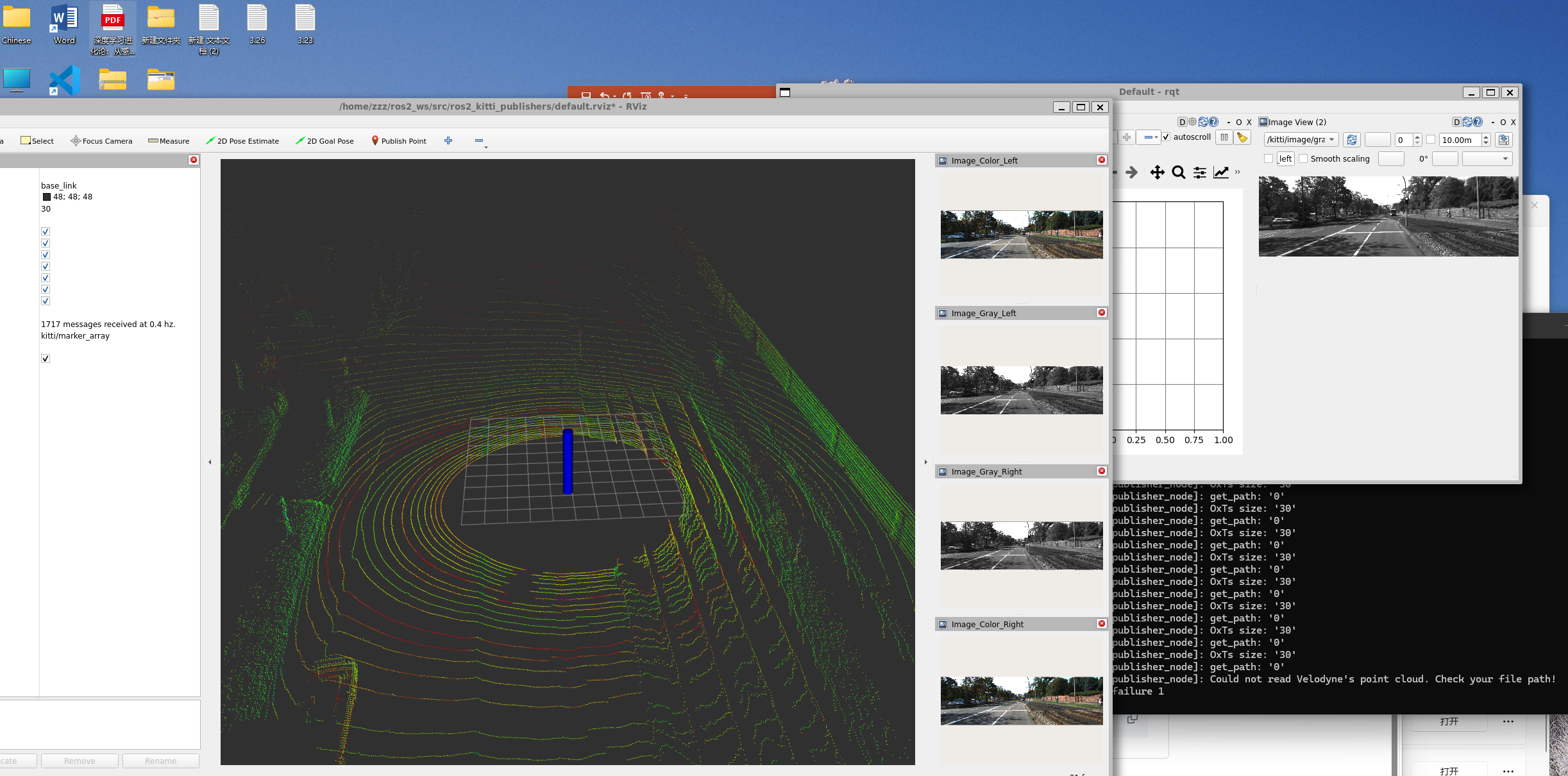
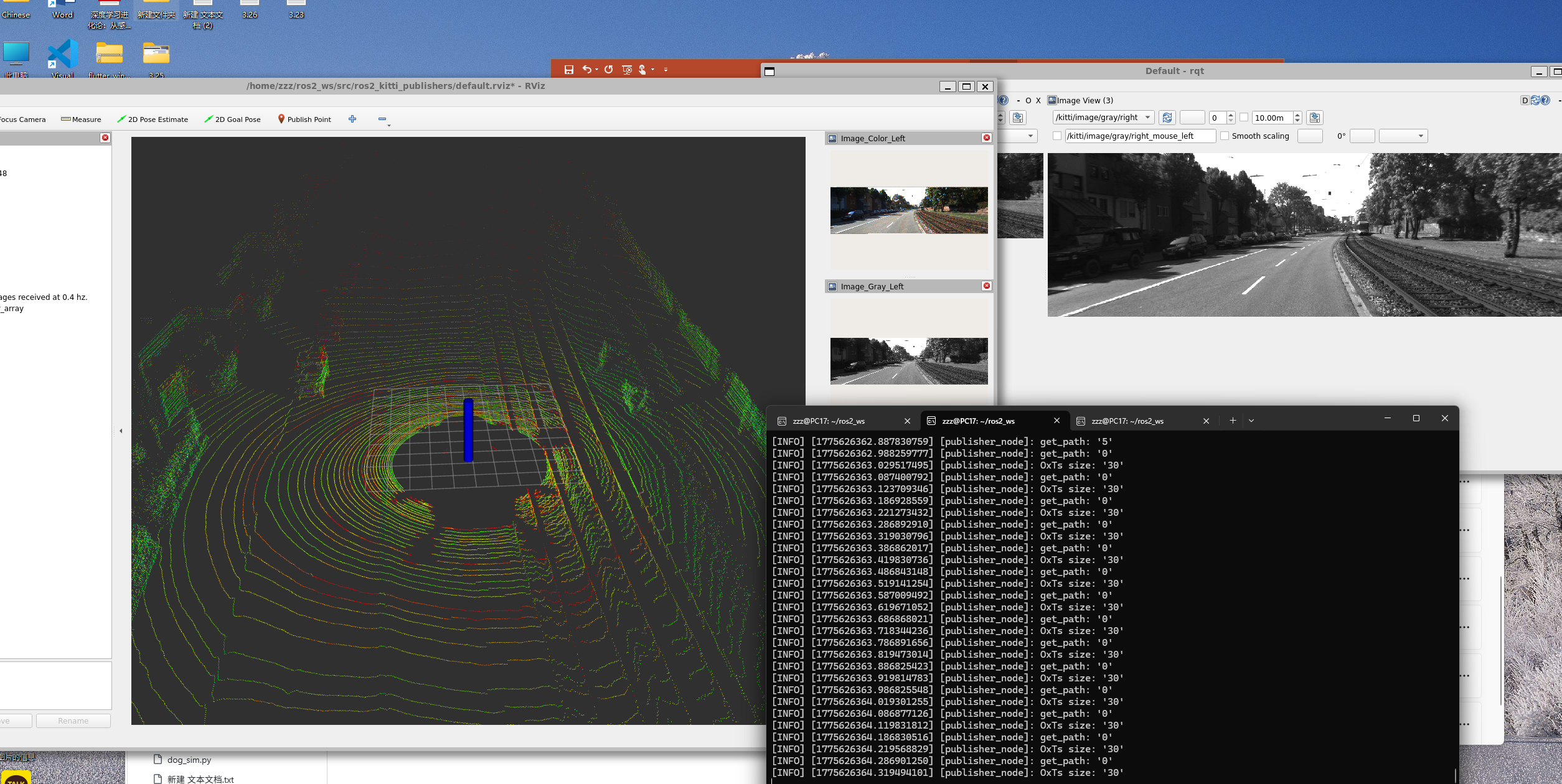
🚀 实验结果
监视器窗口
🎥 视频演示
运行视频
监视器.mp4
💡 核心知识
- ROS2 Topic 通信
- Subscriber 订阅机制
- turtlesim 位姿信息
- 实时数据刷新
⚠️ 问题与解决
问题
数据更新不稳定。
原因
订阅频率设置过低。
解决方案
提高 callback 更新频率。
🧠 实验总结
本实验完成了基础机器人监视系统开发。
通过订阅 /turtle1/pose:
- 学习了 ROS2 通信机制
- 掌握了实时数据监控
- 理解了机器人状态反馈原理
为后续机器人控制与强化学习实验打下基础。