AI Robotics Homework
本仓库整理了 AI Robotics 课程每周实验与项目。
在线访问
🔗 https://zone57.github.io/ai-robot–/
课程作业目录
- Week 1:WSL 与 ROS2 安装
- Week 2:ROS2 Topic 通信实验
- Week 3:机器人运动控制
- Week 4:Python 与 PyBullet
- Week 5:Linux 与机器人运动学
- Week 6:闭环控制与避障逻辑实验
- Week 7:前半学期复习与模拟练习
- Week 8:Docker ROS2 环境
- Week 9:ROS2 小乌龟与 Docker
- Week 10:Docker 镜像构建与 OpenCV、PyBullet
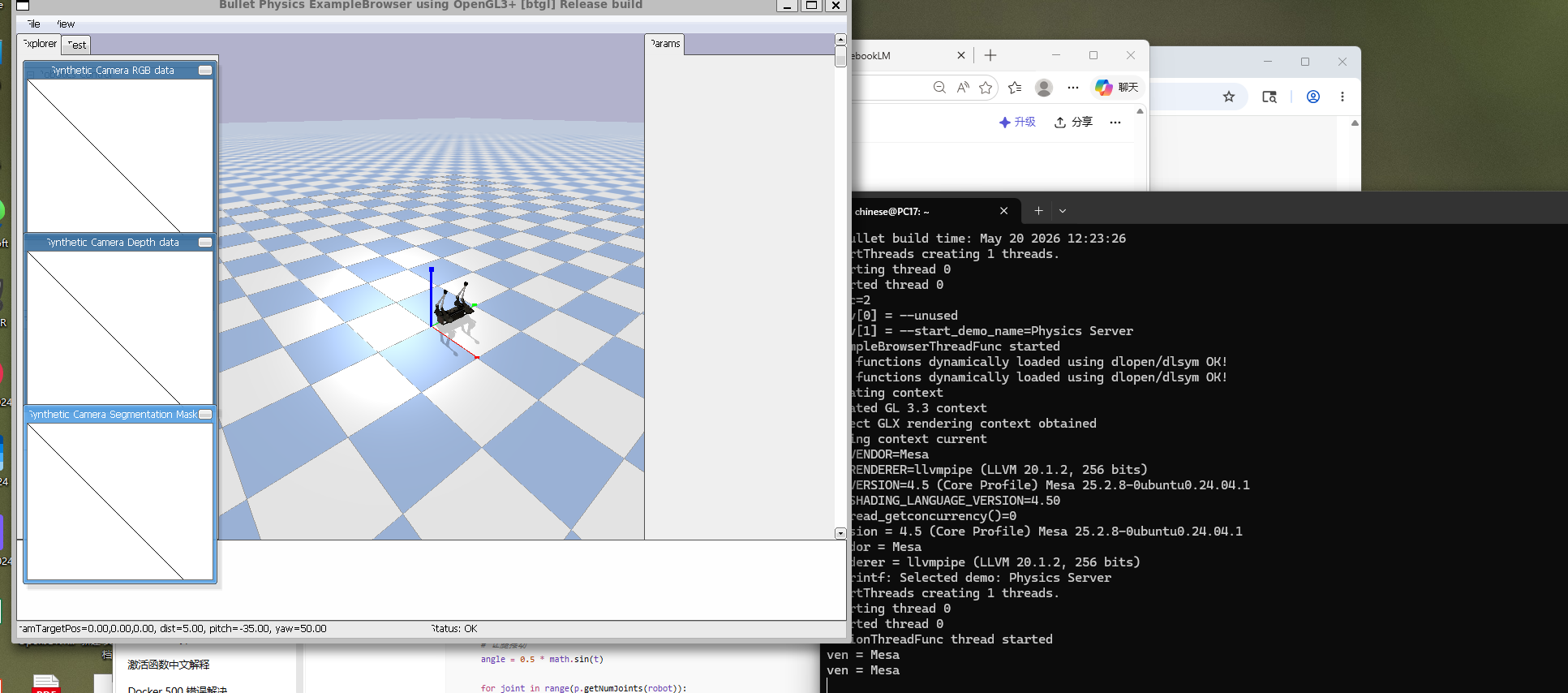
- Week 11:四足机器人仿真与 PPO 强化学习
- Week 12:摄像头标定与 Camera Bridge(Flask + SocketIO 实时图像传输)
- Week 13:四足机器人入门与期末项目实施
- Week 14:ROS2 Turtlesim Remote Control Project
技术栈
- ROS2
- Python
- PyBullet
- Reinforcement Learning
- PPO
- Docker
- OpenCV
- Ubuntu
- WSL2
项目展示
🤖 四足机器人
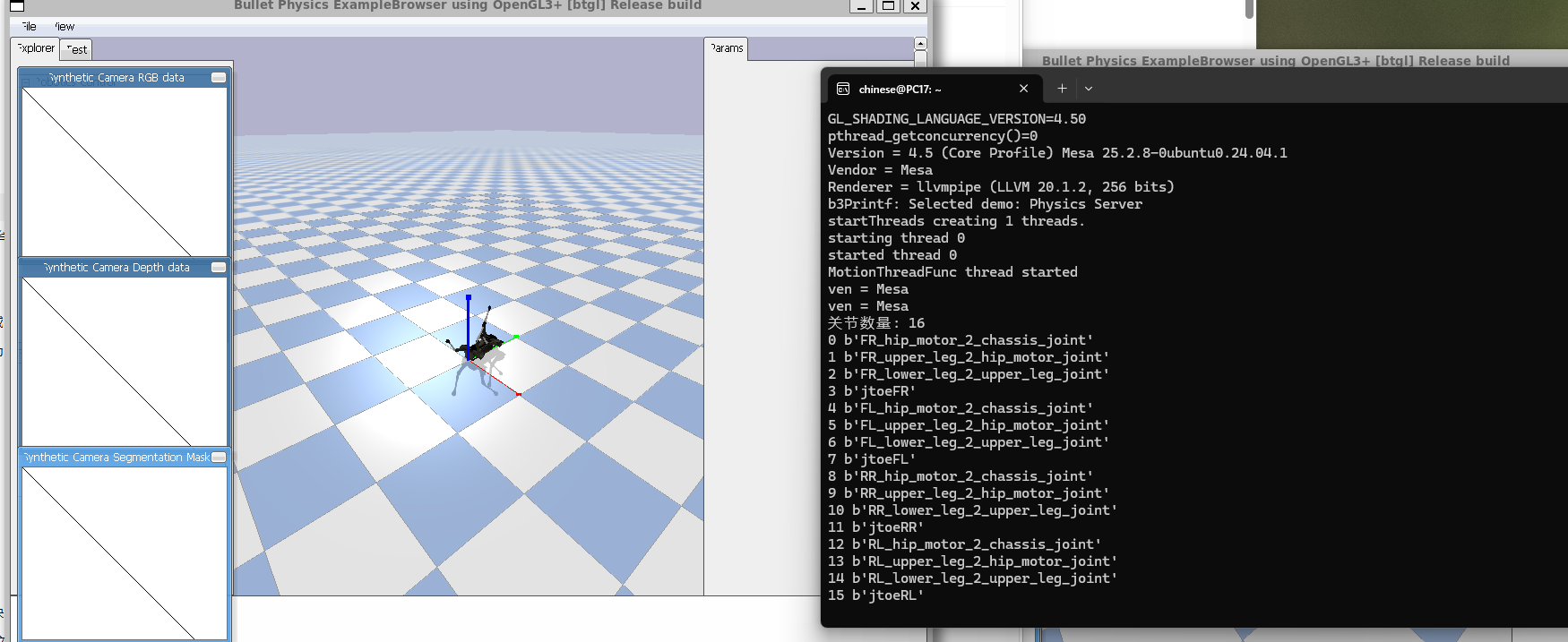
🐕 Trot 步态控制
强化学习
本项目学习并实践了 PPO(Proximal Policy Optimization)强化学习算法,用于训练四足机器人稳定行走。
主要内容包括:
- 状态(State)
- 动作(Action)
- 奖励函数(Reward)
- 策略优化(Policy Optimization)
项目特色
- ROS2 Topic 通信
- TurtleSim 控制
- OpenCV 图像处理
- Docker 容器实验
- 四足机器人步态控制
- PPO 强化学习训练
- GitHub Pages 自动部署
关于我
- 姓名:张皓然
- 学号:20231877
- GitHub:zone57
- 课程:AI Robotics
总结
通过本课程学习了:
- ROS2 通信机制
- Linux 与 Ubuntu
- Docker 基础
- OpenCV 图像处理
- 四足机器人控制
- 强化学习 PPO
- PyBullet 仿真
- GitHub Pages 部署